ARAL基础数据类型说明
1. 数据类型
ARAL 定义了4个基础数据类型:
using Vector6d = std::array<double, 6>;
using VectorNd = std::array<double, ARAL_ROBOT_DOF>; // ARAL_ROBOT_DOF 表示机械臂的自由度数
typedef Vector6d RLPose;
typedef Vector6d RLTwist;
typedef Vector6d RLWrench;
typedef VectorNd RLJntArray;
i. RLPose
RLPose 描述笛卡尔空间的位姿, 前三个元素表示位置, 后三个元素表示姿态, 姿态采用RPY角来描述.
可以作定义 RLPose T_b_a = [x, y, z, rx, ry, rz] 其中:
T_b_a : 为坐标系 a 在坐标系 b 的相对位姿描述
x, y, z: 为坐标系A在坐标系b中的位置描述
rx, ry, rz: 为坐标系A的在坐标系b中的姿态描述
RPY欧拉角可以描述为:
- 转动坐标轴的顺序为:X->Y->Z, 以固定坐标系的姿态作为参考(固定模式),即先绕固定坐标系X轴旋转$\gamma$,再绕固定坐标系Y轴旋转$\beta$,再绕固定坐标系Z轴旋转$\alpha$,如下图所示。(需要注意与浮动模式的区别)
- 以右手法则为准,拇指指向为轴正方向,四指转向为角度正方向。
计算公式如下: 固定模式在数学表达式上表现为旋转矩阵左乘,浮动模式在数学表达式上表现为旋转矩阵右乘。两者的主要区别如下图所示:

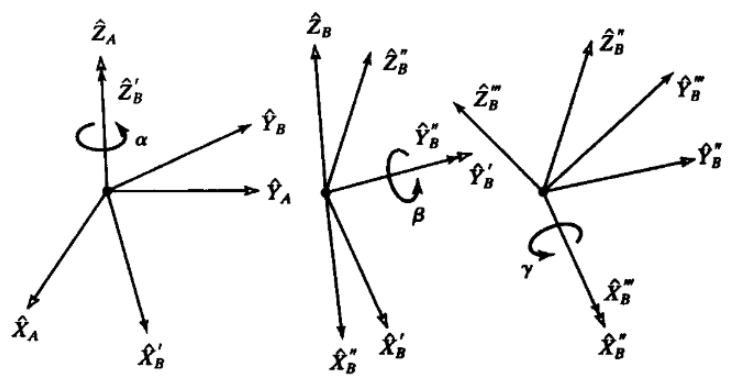
XYZ固定欧拉角(RPY) ZYX浮动欧拉角
要确定一个刚体在空间的位姿,须在物体上固连一个坐标系,然后描述该坐标系的原点位置和它三个轴的姿态,总共需要六个自由度或六条信息来完整地定义该物体的位姿。
理解欧拉角时,应该结合两个维度。1)旋转顺序(XYZ、ZYZ等); 2)参考坐标系(固定模式或者浮动模式)
ii. RLTwist
RLTwist 描述笛卡尔空间的广义速度, 前三个元素表示线速度, 后三个元素表示角速度。
可以作定义 RLTwist V_b_a = [vx, vy, vz, wx, wy, wz] , 其中:
V_b_a: 为坐标系 a 的广义速度在坐标系 b 的描述
vx, vy, vz: 为 坐标系 a 的 线速度
wx, wy, wz: 为坐标系 a 的 角速度
iii. RLWrench
RLWrench 描述笛卡尔空间的广义力, 前三个元素表示力, 后三个元素表示力矩。
可以作定义 RLWrench F_b_a = [fx, fy, fz, tx, ty, tz] , 其中:
F_b_a : 为作用在坐标系 a 的力和力矩在在坐标系 b 的描述
fx, fy, fz: 为 作用在坐标系 a 的力
tx, ty, tz : 为作用在坐标系 a 的矩
iv. RLJntArray
描述机械臂关节空间的量; 表示和机械臂关节角相关的量, 例如关节位置, 速度, 加速度, 关节力矩, 力矩常数等;
2. 参数单位
如没有特殊说明, 所有参数均采用标准单位
算法库中的标准单位有:
- 时间: 秒(s)
- 线位移(距离): 米(m)
- 线速度: 米每秒(m/s)
- 线加速度: 米每二次方秒(m/s^2)
- 角位移(角度): 弧度(rad)
- 角速度: 弧度每秒(rad/s)
- 角加速度: 弧度每二次方秒(rad/s^2)
- 力: 牛顿(N)
- 力矩: 牛米(Nm)
- 质量: 千克(kg)
- 电流: 安培(A)
- 力矩常数: Nm/A